blog
AIブログ
AIによる物体検出の手法やモデルを解説します
画像の中に写っている物が「何か」「どこにあるか」「いくつあるか」を自動で判別するAI技術が物体検出(Object Detection)です。スマートフォンのカメラから自動運転、工場の品質検査まで、私たちの身近な場面に広く浸透しています。本記事では、物体検出の基本的な仕組みから代表的なモデルの特徴、実際の活用事例まで体系的に解説します。
物体検出とは何か
物体検出(物体検知)とは、入力された画像や映像の中から、あらかじめ定められたカテゴリに属する物体の位置・種類・個数を同時に特定する技術です。
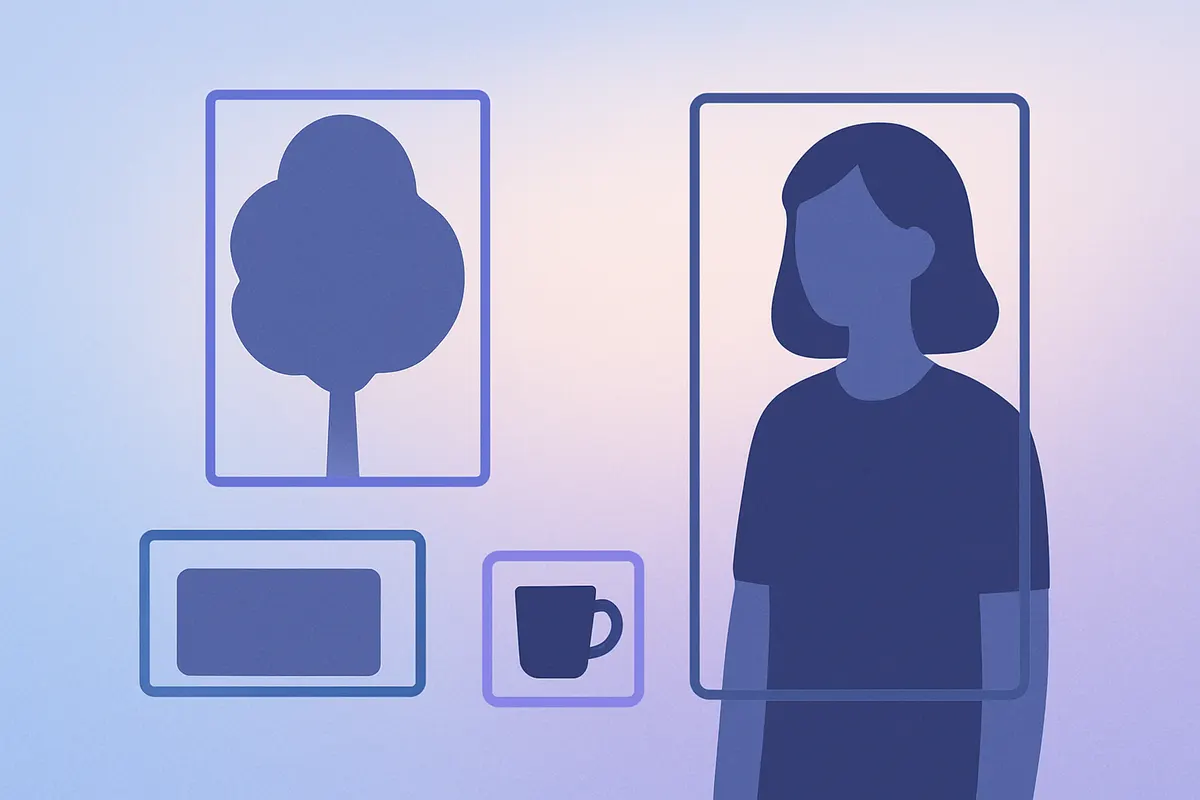
よく混同される「画像分類」と比較すると、その違いが明確になります。画像分類は「この画像には犬が写っている」というように、画像全体に対してラベルを付けるだけです。一方、物体検出ではそれに加えて次の処理を行います。
- 物体が存在する領域(バウンディングボックス)の位置座標を特定する
- 複数の物体が写っている場合、それぞれを個別に識別する
- 検出対象以外の背景や無関係な物体を排除する
- 同じカテゴリの物体が複数あっても、それぞれを個別にカウントする
このように物体検出は、「何が写っているか(分類)」に加えて「どこに何個あるか(位置・個数)」まで答えられる、より高度な画像認識タスクです。検出結果は通常、物体の周囲に矩形のバウンディングボックスと、クラス名および確信度スコアとして出力されます。
画像全体を見て「犬が写っている」と判定する。位置や個数は問わない。
「左上に犬1匹(確信度96%)」「右下に猫2匹(確信度88%)」のように位置・種類・個数を特定する。
物体検出が活用されている場面
物体検出は特定の専門領域に限らず、製造・医療・交通・日常生活など幅広い分野で実用化されています。
製造業・品質検査
物体検出は外観検査の自動化に最も多く用いられている分野のひとつです。部品の取り付け忘れ・取り付け間違い・キズや異物の混入など、従来は熟練した作業員が目視で行っていた検査を、AIが高速かつ高精度で代替します。検査ラインにカメラを設置するだけで24時間365日安定した品質管理が実現できるため、製造コストの削減と品質向上を同時に達成できます。
自動運転・交通インフラ
自動運転車は走行中に周囲の環境をリアルタイムで把握する必要があります。物体検出はカメラ映像から歩行者・他の車両・信号機・道路標識・自転車などを瞬時に識別し、安全な走行判断を支援します。交差点や駐車場での混雑検知、交通量モニタリングにも応用されています。
スマートフォン・カメラ
スマートフォンのカメラアプリで顔にフレームが表示されるのは、物体検出が動作している典型例です。人物の顔を検出してオートフォーカスを最適化したり、笑顔を検出してシャッターを自動で切ったりする機能もこの技術を応用しています。
医療・ヘルスケア
X線・CT・MRI画像から腫瘍・病変・異常な組織を検出する用途で急速に普及しています。医師の診断を補助するCAD(コンピュータ支援診断)システムへの組み込みが進んでおり、見落としリスクの低減や診断効率の向上に貢献しています。
セキュリティ・監視
監視カメラ映像から不審者・危険物・異常行動をリアルタイムで検出するシステムが空港・駅・商業施設などに導入されています。人流分析や不法侵入検知にも活用されています。
農業・インフラ点検
ドローン映像を解析して農作物の生育状況・病害虫の発生・収穫時期を判定したり、橋梁・道路・プラントのひび割れや劣化を自動検出したりする取り組みも進んでいます。
物体検出の基本的な仕組み
現代の物体検出AIの多くは、CNN(畳み込みニューラルネットワーク)をベースに構築されています。CNNは画像の特徴(エッジ・テクスチャ・形状など)を階層的に学習できる構造を持ち、画像認識タスクに非常に高い適性を示します。
物体検出の処理フローは、大きく「特徴抽出」「領域提案」「分類・位置回帰」の3段階に分けられます。
モデルによって「領域提案」を別ネットワークで行うか(Two-stage方式)、一度の処理で完結させるか(One-stage方式)が異なり、それが精度と処理速度のトレードオフに直結します。
代表的な物体検出モデルの解説
物体検出モデルは研究が盛んな分野であり、多くの手法が提案されています。ここでは実務でも広く使われている代表的なモデルを詳しく解説します。
R-CNN(Regional CNN)系列
R-CNNは、ディープラーニングを物体検出に本格的に導入した先駆的モデルです。それまでの手法と比べて検出精度を大幅に向上させ、後続の多くのモデルに影響を与えました。
R-CNNの処理手順は次のとおりです。
- 画像を入力する
- Selective Searchアルゴリズムを用いて、物体が存在しそうな領域候補(Region Proposal)を約2,000個抽出する
- 抽出した各候補領域を一定サイズにリサイズし、CNNで特徴量を計算する
- SVMを用いて各領域に写っている物体のクラスを分類する
- バウンディングボックスの位置を回帰によって精密化する
R-CNNの課題は処理速度とメモリ消費です。2,000個の候補領域それぞれに対して個別にCNNを適用するため、1枚の画像の処理に数十秒かかり、学習フェーズも各コンポーネントを別々に訓練する必要がありました。
この問題を解決するためにFast R-CNNが登場しました。画像全体を一度だけCNNに通して特徴マップを作成し、その上でRoI(Region of Interest)プーリングを行うことで、各候補領域の特徴量抽出を共有化することに成功。R-CNNと比べて学習速度は約9倍、推論速度は約213倍に高速化されました。
さらにFaster R-CNNでは、領域提案自体もニューラルネットワーク(RPN: Region Proposal Network)に置き換えることで、画像入力から物体検出結果の出力まで完全にエンドツーエンドで学習・推論できるようになりました。精度・速度ともにR-CNN系の集大成として位置付けられ、現在でも精度重視の用途で広く利用されています。
- R-CNN 論文:https://arxiv.org/pdf/1311.2524.pdf
- Fast R-CNN 論文:https://arxiv.org/pdf/1504.08083.pdf
- Faster R-CNN 論文:https://arxiv.org/pdf/1506.01497.pdf
YOLO(You Only Look Once)
YOLOは「You Only Look Once(一度見るだけ)」の名が示すとおり、画像全体を一度だけ処理して物体の検出を完了させるOne-stage型の代表的モデルです。リアルタイム処理を最大の特徴としています。
R-CNN系が「候補領域の提案」→「各領域の分類」という2段階で処理するのに対し、YOLOは以下のアプローチを取ります。
- 画像全体をS×Sのグリッドに分割する(例:7×7)
- 各グリッドセルが、そのセルに中心を持つ物体のバウンディングボックスとクラス確率を同時に予測する
- 全グリッドの予測結果をまとめてNMS(Non-Maximum Suppression)で重複除去する
この一括処理方式により、Faster R-CNNと比べて処理速度は数倍〜数十倍に達し、リアルタイムの映像ストリームへの適用が現実的になりました。また画像全体を1枚として学習するため、背景の誤検出(false positive)を抑える効果もあります。
一方で初代YOLOの弱点は、密集した小物体の検出精度です。各グリッドセルが担当できる物体数に制限があるため、物体が密集するシーンでの精度がFaster R-CNNより劣りました。
YOLOはその後も継続的に改良が重ねられ、バージョンを追うごとに精度と速度のバランスが向上しています。YOLOv5はPyTorchベースで実装され、カスタムデータセットへの転移学習が容易なことから産業界でも広く使われるようになりました。その後YOLOv8(2023年)、YOLOv9・YOLOv10(2024年)と開発が続いており、2026年現在もYOLOシリーズは活発に更新されています。最新版ではアーキテクチャの刷新により、小物体検出精度や速度がさらに改善されています。
- YOLO論文(v1):https://arxiv.org/pdf/1506.02640.pdf
SSD(Single Shot MultiBox Detector)
SSDは「Single Shot MultiBox Detector」の略で、YOLOと同じOne-stage型でありながら、精度をFaster R-CNN並みに保ちつつリアルタイム処理を実現したモデルです。
SSD最大の特徴は、複数スケールの特徴マップを同時に活用する点です。CNNの浅い層では解像度が高く小さな物体を捉えやすく、深い層では解像度が低いがより抽象的な特徴を捉えます。SSDはこれら複数の異なるスケールの特徴マップからそれぞれ検出を行い、最後に統合することで、大きな物体から小さな物体まで幅広いサイズの物体を精度良く検出できます。
各特徴マップでは、あらかじめ定義された複数のアスペクト比・スケールを持つ「デフォルトボックス(アンカーボックス)」を使って、物体の存在確率とバウンディングボックスのオフセットを予測します。
YOLOと比較すると、マルチスケール対応により特に物体が多数写っているシーンや小物体の検出精度が高い点が優れています。処理速度もリアルタイム検出に十分なレベルを維持しており、速度と精度のバランスが優れた手法として広く利用されています。
DETR(DEtection with TRansformers)
DETRは、Facebookが2020年に発表した、Transformerアーキテクチャを物体検出に応用した革新的なモデルです。それまでの物体検出モデルが抱えていた以下の課題を根本から解決しました。
- アンカーボックスの手動設計が必要(サイズ・アスペクト比のチューニング)
- NMS(Non-Maximum Suppression)による事後処理が必須
- 重複する物体候補の除去ロジックが複雑で、アノテーション方法によって精度が大きく左右される
DETRの処理は次の段階で構成されます。
Backbone(特徴抽出):入力画像をCNNで処理し、低次元の特徴マップを生成します。
Transformer Encoder:CNNが出力した特徴マップを1次元のシーケンスに変換し、位置エンコーディングを付加してTransformer Encoderに入力します。EncoderはSelf-Attentionにより画像全体の文脈的な特徴を学習し、並列処理で効率よく特徴を統合します。
Transformer Decoder:EncoderからのクロスアテンションとN個の「object query」(学習可能な位置エンコーディング)を組み合わせてデコードします。object queryはネットワークの重みと同様に学習されるパラメータです。機械翻訳と異なり、N個のqueryをすべて同時にDecodeする並列処理(parallel decoding)が可能です。
FFN(Feed Forward Network):Decoderが出力したN個のオブジェクト特徴それぞれを独立したFFNに通し、各物体のクラスラベルとバウンディングボックス座標(矩形)を予測します。
処理フローを整理すると次のとおりです。
- CNN出力の特徴マップを1×1 convolutionでdチャネルに圧縮する
- Transformer EncoderにH×W個のd次元特徴として入力し、H×W個の中間オブジェクト特徴を出力する
- Transformer DecoderにEncoder出力とN個のobject queryを入力し、N個のオブジェクト特徴(各d次元)を出力する
- N個のオブジェクト特徴をそれぞれFFNへ通し、N個のオブジェクト推論結果(クラス、矩形座標)を得る
DETRでは位置エンコーディング(object queryとspatial positional encoding)をEncoder・Decoderの各層で繰り返し使用することで精度を向上させています。また、object query(学習値)とspatial positional encoding(固定値)を場所ごとに使い分ける設計も精度向上に寄与しています。
学習済みDETRモデルを使えば、街中の風景画像から人・車・バッグなどの物体を検出し、クラス名と確信度スコア(1に近いほど確信が高い)が付いたバウンディングボックスを出力することができます。
DETRの登場以降、Deformable DETR・Conditional DETR・DN-DETRなど派生モデルの研究が活発化しており、Transformerベースの物体検出は2026年現在も最前線の研究テーマです。
その他の注目モデル
上記以外にも、用途に応じて選択肢となる代表的なモデルがあります。
Pelee:モバイル・組み込みデバイスなどリソースが限られた環境向けに設計された軽量モデルです。MobileNetベースのアーキテクチャを採用し、計算コストを抑えながら実用的な精度を実現しています。
M2Det:SSDのマルチスケール特徴を発展させた手法で、Multi-Level Feature Pyramid Network(MLFPN)と呼ばれる特徴ピラミッド構造により、様々なスケールの物体をより精度高く検出します。
AIの業務導入をご検討の方は、AI開発会社クリスタルメソッドの無料相談をご利用ください。
主要モデルの特徴比較
| モデル | 方式 | 検出精度 | 処理速度 | 主な特徴・向いている用途 |
|---|---|---|---|---|
| R-CNN | Two-stage | 高 | 非常に低速 | 先駆的モデル。現在は後継モデルを使用 |
| Faster R-CNN | Two-stage | 非常に高 | 中程度 | 高精度が求められる検査・医療画像解析 |
| YOLO(最新版) | One-stage | 高〜非常に高 | 非常に高速 | リアルタイム検出・自動運転・監視カメラ |
| SSD | One-stage | 高 | 高速 | マルチスケール対応・多数物体・小物体の検出 |
| DETR | Transformer | 非常に高 | 中程度 | アンカー不要・エンドツーエンド学習・研究用途 |
| Pelee | One-stage | 中 | 高速 | モバイル・組み込みデバイスへの搭載 |
物体検出AIの実務への適用例
実際の産業現場では、物体検出AIは以下のような形で活用されています。
部品の誤欠品検査
製造ラインを流れる製品に対して、カメラで撮影した画像をリアルタイムで解析し、部品の取り付け忘れ・取り付け位置のズレ・誤った部品の組み込みを自動検出します。従来は熟練した検査員が目視で確認していた工程を自動化することで、検査漏れを大幅に削減し、人員を高付加価値業務に集中させることができます。
異常品・不良品の検知
製品表面のキズ・変形・汚れ・異物混入などを物体検出AIで自動識別します。複数の不良パターンをモデルに学習させることで、目視では見落としやすい微細な欠陥も高精度で検出できます。検査速度も人間の目視より格段に速く、大量生産ラインでの品質維持に有効です。
このように物体検出AIは、「人が目視で行ってきた判断業務」を自動化・高速化・安定化する基盤技術として、製造現場をはじめとする様々な産業で導入が加速しています。
よくある質問
Q. 物体検出とは何ですか?
A. 本文「物体検出とは何か」で解説しています。
Q. 物体検出はどんな場面で使われていますか?
A. 本文「物体検出が活用されている場面」で紹介しています。
Q. 代表的なモデルにはどんなものがありますか?
A. 本文「代表的な物体検出モデルの解説」「主要モデルの特徴比較」で整理しています。
Q. 実務にはどう適用されていますか?
A. 本文「物体検出AIの実務への適用例」で解説しています。
まとめ
物体検出AIは、画像・映像の中から物体の「位置・種類・個数」を同時に特定する技術であり、単なる画像分類を超えた高度な認識能力を持っています。CNNを基盤としながら、R-CNN系・YOLO・SSD・DETRといったモデルがそれぞれ異なるアプローチで精度と速度のバランスを追求してきました。
- R-CNN / Faster R-CNN:Two-stage方式で高精度。精度重視の用途に適する
- YOLO:One-stage方式でリアルタイム処理が強み。バージョンアップが続く実用モデル
- SSD:マルチスケール特徴により速度と精度を両立。多物体・小物体検出に強い
- DETR:Transformerによるエンドツーエンド学習でアンカー設計不要。研究最前線のアーキテクチャ
活用シーンは製造業の品質検査・自動運転・医療診断支援・セキュリティ・農業など多岐にわたり、2026年現在も精度・速度・汎用性のさらなる向上を目指した研究開発が世界中で続いています。用途に合ったモデルを選択し、実際のデータで転移学習を行うことが、物体検出AIを実務に活用する上での基本的なアプローチです。
監修
河合 継(クリスタルメソッド株式会社 代表取締役)
AI・ディープラーニングに関する特許16件の発明者。過去、国立がん研究センターとの共同研究や、テレビ番組でのAI解説実績を持つAI研究者として、AIの研究開発を主導している。
運営会社について | 編集方針
AIの業務活用をご検討の方へ
クリスタルメソッドは、バーチャルヒューマンをはじめAIの開発・業務導入を支援しています。生成AI・AIエージェントの活用や、自社業務へのAI導入をご検討の際は、お気軽にご相談ください。
- 無料相談・お問い合わせ:ご相談はこちら
Study about AI
AIについて学ぶ
-

生成AIの著作権と法的リスクを回避する安全対策|米国xAI社提訴から学ぶ経営視点の実務
## 生成AIの法的リスクを浮き彫りにしたxAI社への民事訴訟 2026年7月23日、米国の法律事務所Potts Law Firmは、xAI社(Grok AIの...
-
AI ユーザー 活用実態 調査から紐解く日本企業の現在地と経営層が取るべき次の一手
対話型AIの急速な普及に伴い、世界のユーザーが実際にどのような目的でAIを使い、どのような課題に直面しているのか、その具体的なデータの蓄積が進んでいます。Goo...
-

AIモデル盗用セキュリティリスクとは?MoonshotのClaude 5蒸留疑惑から学ぶ企業の防衛策
AIモデル盗用セキュリティリスクとは?MoonshotのClaude 5蒸留疑惑から学ぶ企業の防衛策 生成AIの急速な普及と高度化に伴い、企業の意思決定者は生産...